The flaw of the submerged machine
Modern robotics wastes power. They rely on complex propulsion: propellers, jets, brute force. This creates noise. This burns energy. The most efficient locomotion needs no complex engine. It uses the water’s surface itself.
The Mimétique Code holds the answer. Surface tension is not just a ripple. It is a structural force. The ultimate machine must leverage physics, not sheer power. We decode the Water Strider. We create the next generation of silent, energy-independent machines.
The biological mandate: power is in the physics
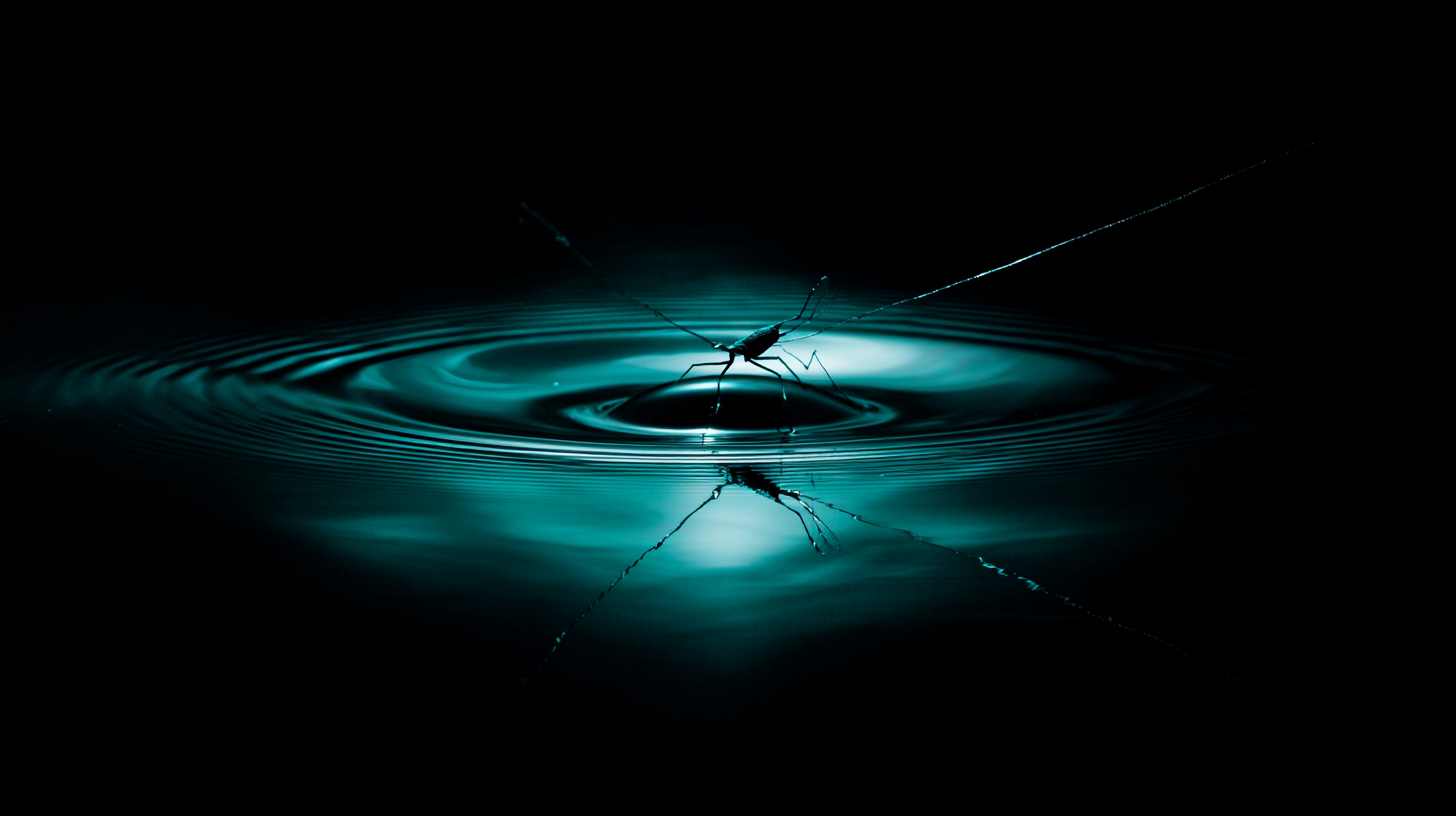
The Water Strider is a master of physics. Its mastery lies in one simple fact: the perfect interface between air and water.
The Principle is simple: Hydrophobic Micro-Hairs. The Strider’s legs are a design genius. They are covered in thousands of tiny, non-wetting hairs (setae). Each hair is coated in a complex wax.
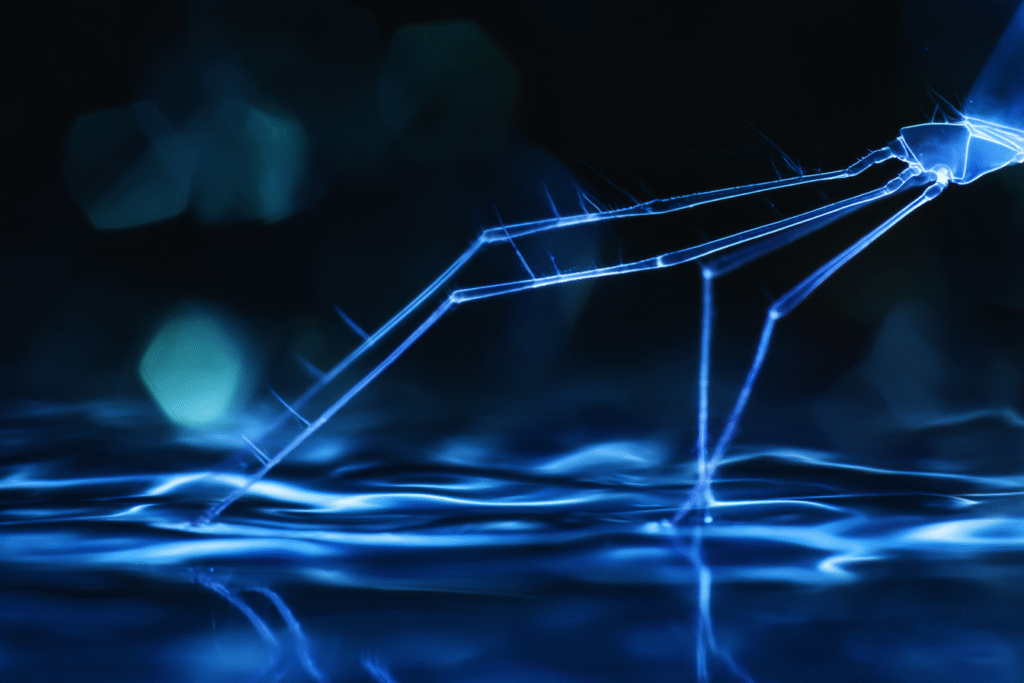
The mechanism is perfect: This micro-structure traps a layer of air. It creates a superhydrophobic surface. Water molecules are forced to cling to each other (surface tension). They refuse to cling to the leg hairs.
The genius is stability: The legs dimple the water. They create small, supportive air pockets. They never break the surface tension. The strider walks on its own stable depressions.
Locomotion: the elegant propulsion hack
The Water Strider does not just stand on water. It moves with speed. It moves with agility.
The principle is force: It uses Asymmetric Force Application. It pushes downward. It pushes slightly backward. Crucially, it pushes outward. This creates maximum surface tension force.
The Mimétique Solution is smooth: Its specialized middle legs act like curved oars. They execute an oar-like stroke. They create a hemispherical wake. This wake propels the body forward. The water-air interface remains unbroken.
The water-walking robot
Bio-engineers are translating this protocol. They create autonomous, silent robots. This is the blueprint for silent environmental and industrial use.

The actuator design (the legs)
The innovation is minimal: We design legs using carbon fiber. We use lightweight polymers. We cover these structures in nanostructured superhydrophobic coatings. They mimic the strider’s hairs. These legs manage weight. They ensure stability.
The application is subtle: sensor deployment. The robot carries lightweight sensors. It carries cameras. It never disturbs the water. This is ideal for monitoring pollution. This is perfect for wildlife observation.
The propulsion system (the silent drive)
The innovation is quiet: We replace noisy motors. We use compliant, slow-motion actuators. Think soft pneumatics. They execute the strider’s curved, silent stroke.
The application is critical: Stealth and Silence. The final robot is virtually silent. It creates zero wake. This is perfect for military surveillance. This is ideal for quiet inspection of reservoir surfaces.
Surface physics
The Water Strider provides a powerful blueprint. It is a zero-wake, zero-waste design. It teaches us the true lesson of robotics: do not brute-force the problem.
Leverage the natural physics of the environment. The mandate is clear: build security that is silent, efficient, and environmentally non-invasive.
Leave a Reply